Publications
2026
- Preprint
 Efficient Multi-Robot Motion Planning with Precomputed Translation-Invariant Edge BundlesHimanshu Gupta, Paul Motter, Aritra Chakrabarty, Rishabh Sodani, Srikrishna Bangalore Raghu, Alessandro Roncone, Bradley Hayes, and Zachary Sunberg2026
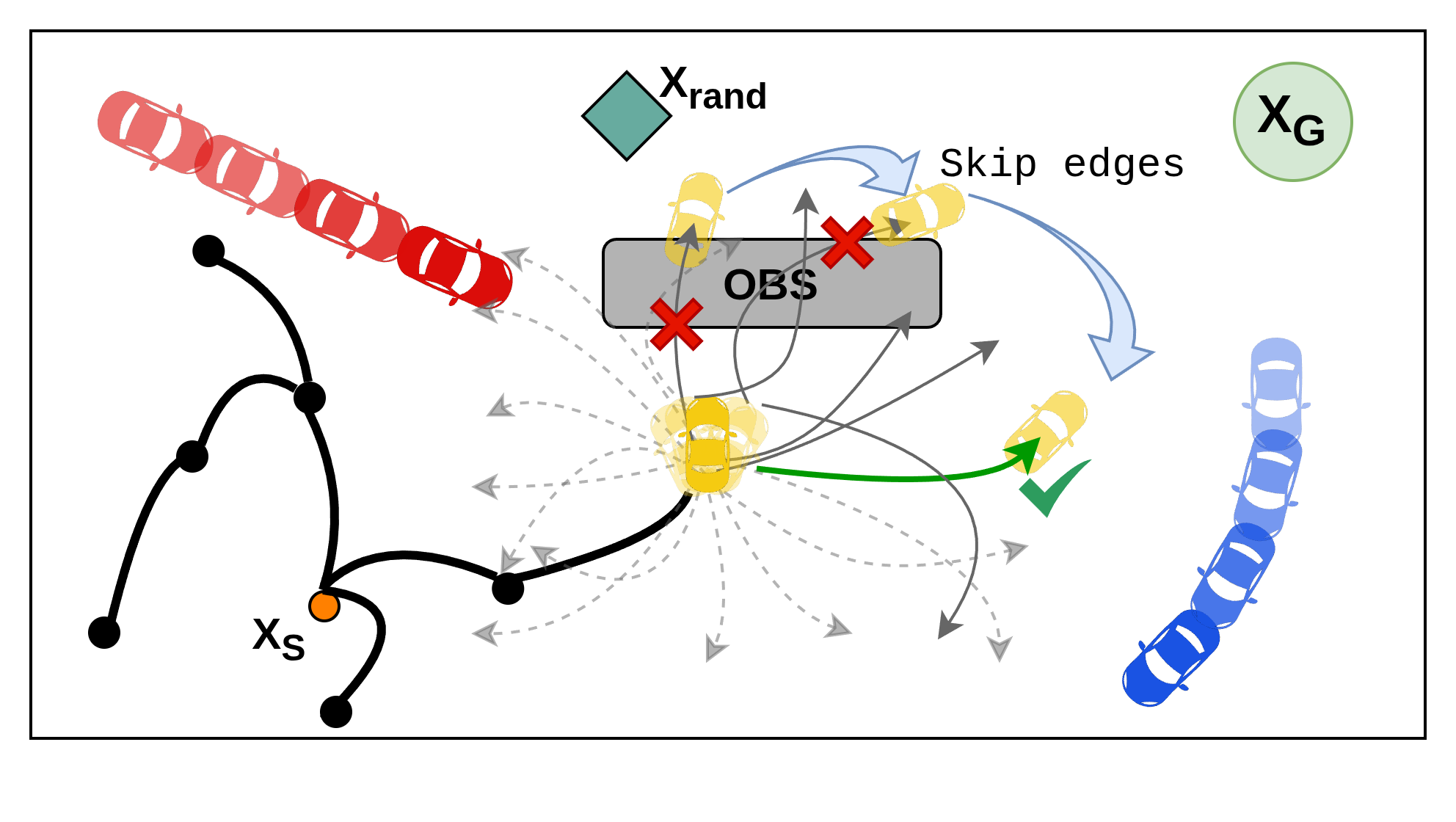
Efficient Multi-Robot Motion Planning with Precomputed Translation-Invariant Edge BundlesHimanshu Gupta, Paul Motter, Aritra Chakrabarty, Rishabh Sodani, Srikrishna Bangalore Raghu, Alessandro Roncone, Bradley Hayes, and Zachary Sunberg2026Solving multi-robot motion planning (MRMP) requires generating collision-free kinodynamically feasible trajectories for multiple interacting robots. We introduce Kinodynamic Translation-Invariant Edge Bundles or KiTE-Extend, a planner-agnostic action selection mechanism for sampling-based kinodynamic motion planning. KiTE-Extend uses a library of trajectory segments computed offline to guide action selection during online planning, improving the ability of existing planners to identify feasible motion segments without altering state propagation, collision checking, or cost evaluation, and without changing their theoretical guarantees. While KiTE-Extend can modestly improve single-agent planners, its benefits are most clear in the multi-agent setting, where it is able to explore more effectively and significantly improve planning through the dense spatiotemporal constraints introduced by robot-robot interaction. Through experiments on multiple kinodynamic systems and environments, we show that KiTE-Extend reduces planning time and improves scalability across the three most common MRMP paradigms: centralized, prioritized, and conflict-based.
@article{gupta2026kiteextend, title = {Efficient Multi-Robot Motion Planning with Precomputed Translation-Invariant Edge Bundles}, author = {Gupta, Himanshu and Motter, Paul and Chakrabarty, Aritra and Sodani, Rishabh and Raghu, Srikrishna Bangalore and Roncone, Alessandro and Hayes, Bradley and Sunberg, Zachary}, year = {2026}, }